Project template
Навигация по текстовым инструкциям — давний вызов для автономных дронов. Традиционные алгоритмы на основе обучения с подкреплением требуют больших датасетов и плохо переносятся на новые домены. Недавняя волна решений на базе визуально-языковых моделей обещала универсальность, но часто просила модель выпускать команды в текстовом виде: поверни, лети, поднимись. Язык оказался неудобен для точных чисел и не учит модель трёхмерной механике полёта. Исследователи предлагают на редкость здравую замену: перестать говорить руками и просто показывать точку в кадре, куда дрон должен двигаться.
Research
GPS (Global Positioning System) is a network of satellites in orbit (about 30 satellites).
They continuously send signals down to Earth with:
The exact time the signal was sent.
The satellite’s position in space.
Your phone, car, or GPS device listens to these signals.
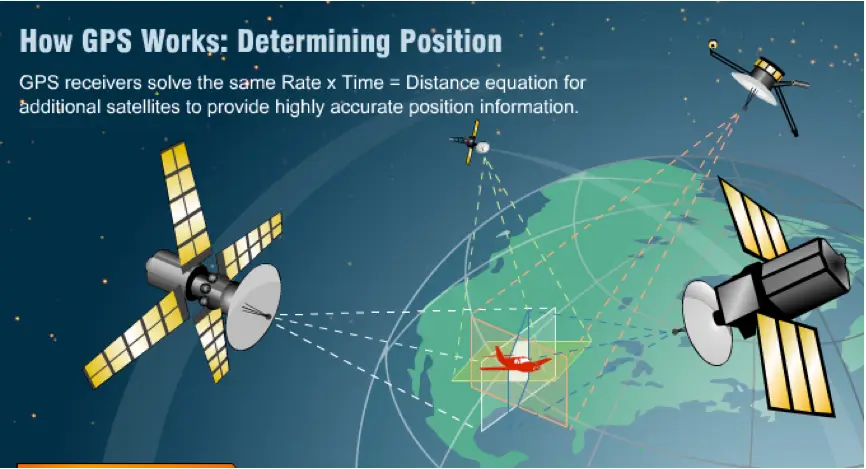
📡 2. How Your Device Uses Satellites
Your GPS receiver picks up signals from at least 4 satellites.
Each signal travels at the speed of light, so by measuring how long the signal took to arrive, the device can calculate the distance to each satellite.
This is like hearing echoes and knowing how far away the wall is.
With distances to several satellites, the device uses trilateration (not triangulation):
1 satellite → you’re somewhere on a sphere.
2 satellites → spheres overlap = circle.
3 satellites → intersection of spheres = 2 points.
4 satellites → eliminates errors, gives your exact position (latitude, longitude, altitude).
⏱️ 3. Why Precise Time Matters
Satellites have atomic clocks (extremely precise).
Your phone’s clock isn’t as accurate, so using a 4th satellite lets GPS correct the time difference.
Without this, your position would be off by kilometers.
🛰️ 4. What About Accuracy?
Normally: ~5–10 meters accuracy on a phone.
With systems like DGPS (Differential GPS) or RTK (Real-Time Kinematic), accuracy improves to centimeters (used in surveying, agriculture, drones).
Make Corpus
It will be cool to make corpus look like real sitelite.

I have find that model that will look incredible if place all electronics there
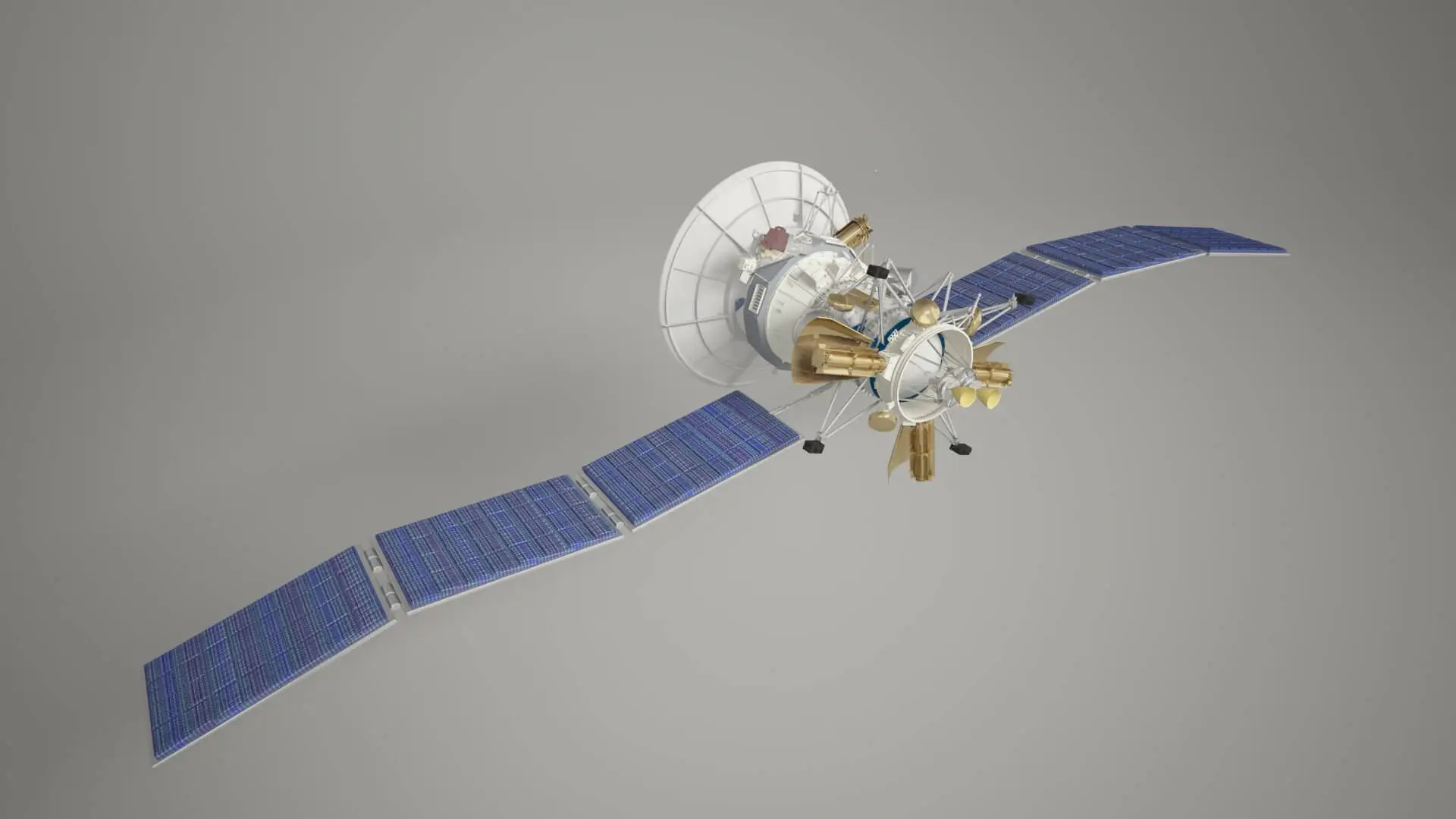
Make Corpus
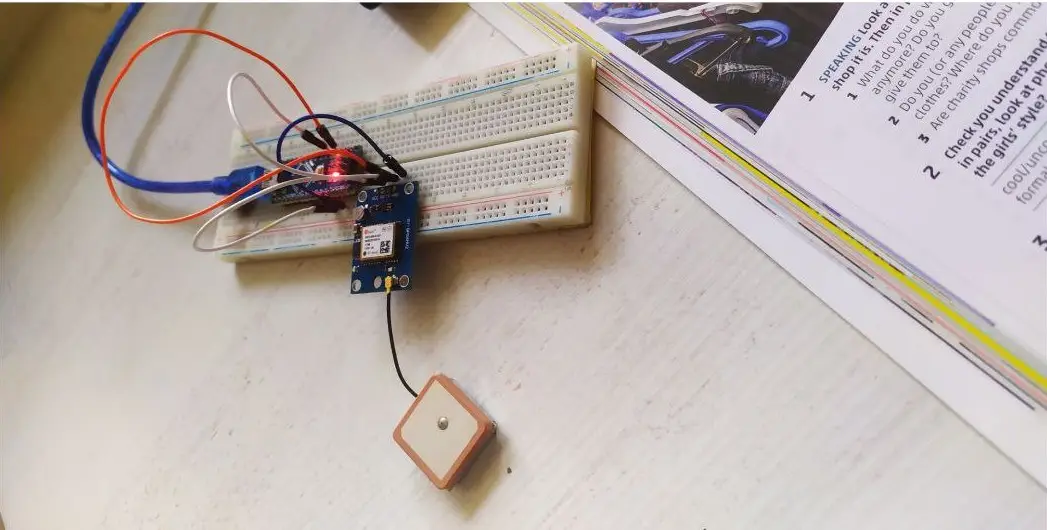
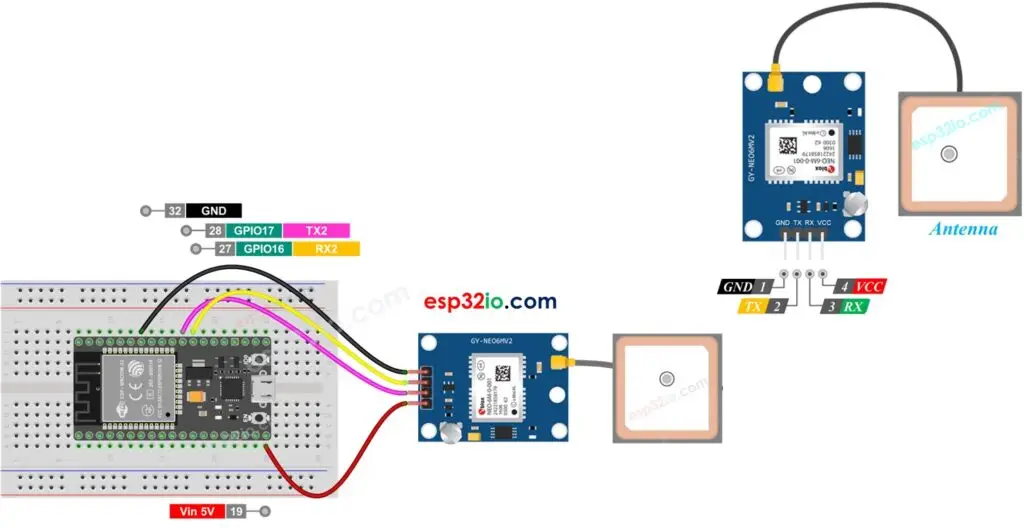
Physical wiring (basics)
Common ground: connect GPS GND → ESP GND.
Power: GPS VCC → 3.3V on the ESP (if module supports 3.3V).
UART (crossed):
GPS TX → ESP RX
GPS RX → ESP TX
Optional: GPS PPS (pulse per second) → any ESP GPIO if you need accurate 1Hz timing.
Antenna: place GPS module with clear view of sky for best fix.
Important notes
Cross TX/RX: always GPS TX → ESP RX and GPS RX → ESP TX.
Voltage levels: ESP boards are 3.3V logic. If GPS is 5V-only, use a level shifter on RX/TX.
Baud: default usually 9600. If you see garbage, try other common rates or check module settings.
USB/debug conflict (ESP8266): using UART0 for GPS will prevent normal Serial Monitor debugging — use SoftwareSerial or momentarily disconnect GPS for flashing. ESP32 avoids this by using Serial1/2.
Parsing: GPS sends NMEA sentences (ASCII). Use libraries like TinyGPS++ to parse location/time easily.